以下内容发表在「SysPro系统工程智库」知识星球
- 关于电驱动系统标定全流程深度拆解 | 性能->诊断-> 驾驶性v1.0
- 「SysPro 动力系统功能解读」专栏内容,全文11800字
- 非授权不得转载,或进行散播,或用于任何形式商业行为
- 本篇为节选,完整内容会在知识星球发布,详细分布见目录页
导语:今天聊聊电驱动系统的标定,本篇,我们会把性能标定、诊断标定和驾驶性标定放到同一条系统链路里,建立对标定的二维坐标,按"对象—流程—边界—量产闭环"四个层级,讲清楚标定是如何帮助整车建立扭矩秩序的?
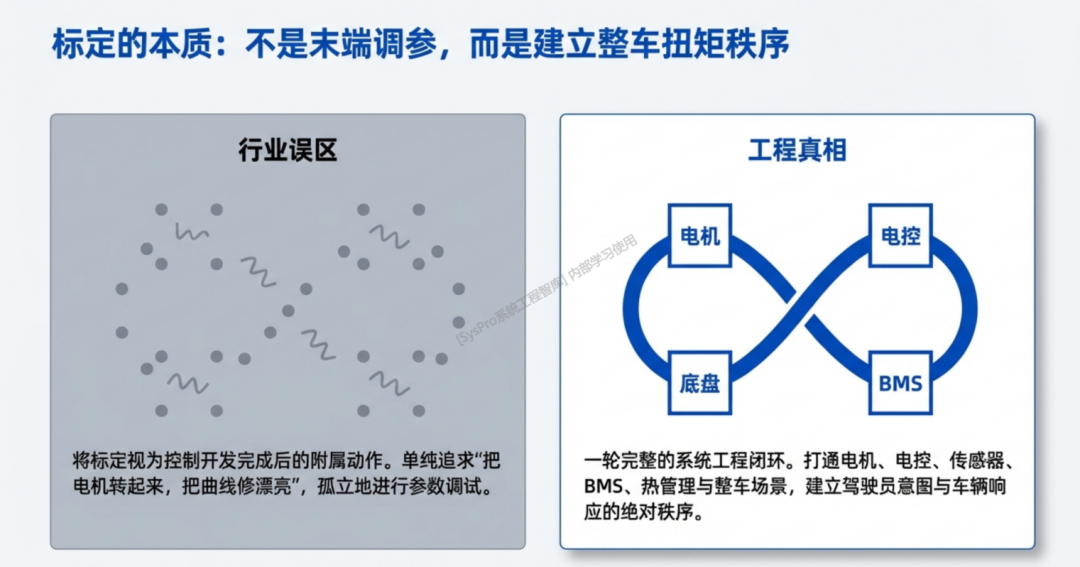
很多人第一次接触电驱动系统标定时,会把它理解成"把电机调转起来,再把几张曲线修漂亮"。但事情远没有这么简单:电驱动系统要不要给准扭矩?能不能在高速区继续放出能力?故障来临时会不会误报或漏报?坡道和冰面上会不会抖?热浸之后还能不能把驾驶感受守住?这些问题最后都会落到标定上。也就是说,标定并不是控制开发完成之后的附属动作,而是把电机、电控、传感器、BMS、热管理、传动系统和整车场景重新打通的一轮系统工程,是真正让我们电驱动产品"变得优秀"的精髓所在!
图片来源:SysPro
这个系列,我们暂定的计划是:1)先看台架标定到底在标什么、准备什么、按什么顺序推;2)再看相序、偏移角、磁链、Lq/Ld、PI、MTPA、弱磁、最大电流和四象限边界为什么必须一层层建立;3)然后再继续往下看动态响应、旋变与高压诊断、堵转与降额、坡道和冰面驾驶性,4)最后看冬夏季道路验证如何把前面所有结论重新压测一遍。
图片来源:SysPro
跟着我们过完这条主线,相信后续再去看任何一个具体参数,脑子里就不会只剩下"这个值调大还是调小",而会先想到它在整条控制链里的位置、它和谁耦合?它解决的到底是对象认识问题、性能释放问题、还是安全收口问题?
最后,如果时间精力允许,这个系列我们会把两个关键点并进来:
第一件是生产扭矩秩序:很多团队把扭矩问题理解成"驱动器算得准不准",却没有继续追问扭矩命令是怎样被组织、过滤、限幅、仲裁、落地到驱动系统里的。
第二件是模型化标定与自动化工具链:当对象参数越来越多、边界越来越复杂、项目节奏越来越快之后,只靠人工扫点和经验回填,已经很难支撑量产平台化。也就是说,今天讨论电驱动系统标定,必须同时覆盖"生产秩序"与"数据秩序"这两条线。
|SysPro备注:标定,我们早已规划的内容,本次是1.0首发,内容较长分上/中/下,如果大家有更多的实践性问题可以在文末留言,会在2.0中进行解答。
图片来源:SysPro
目录
上篇
01 标定本质:建立整车扭矩秩序
1.1 性能、诊断、驾驶性三层逻辑
1.2 台架/软件/整车统一协同语言
02 台架标定前:输入条件与验收口径
2.1 先决条件对标定质量的影响
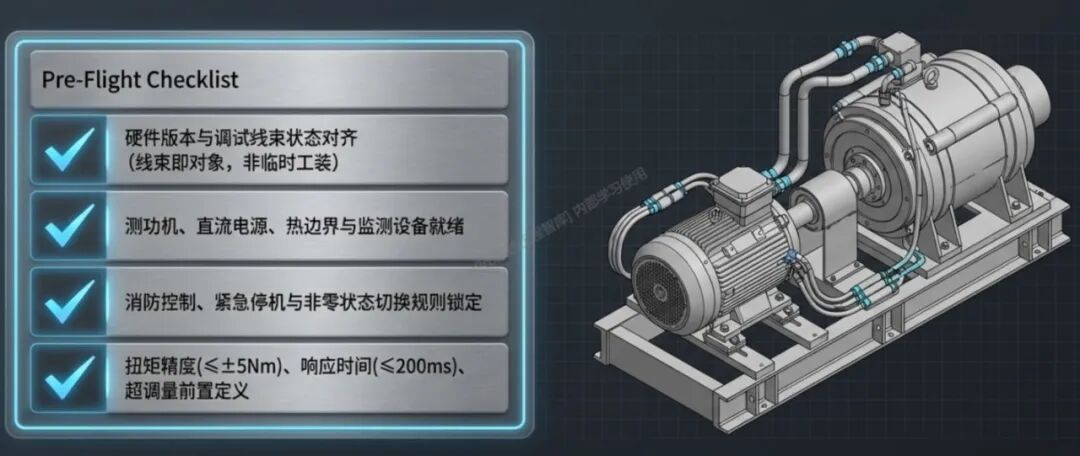
2.2 上线前检查与指标定义
03 标定流程:步骤与先后依赖关系
3.1 全流程节点与执行顺序
3.2 数据核对、版本冻结与复测
中篇
04 基础坐标系与对象参数标定
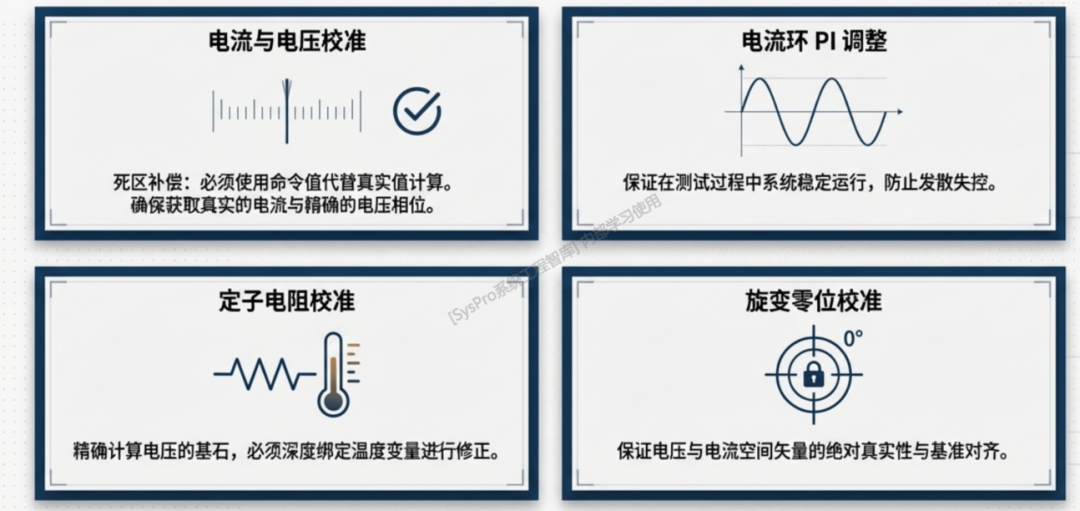
4.1 相序、转向、极对数与旋变偏移
4.2 电流环PI、磁链、Lq/Ld与传感器
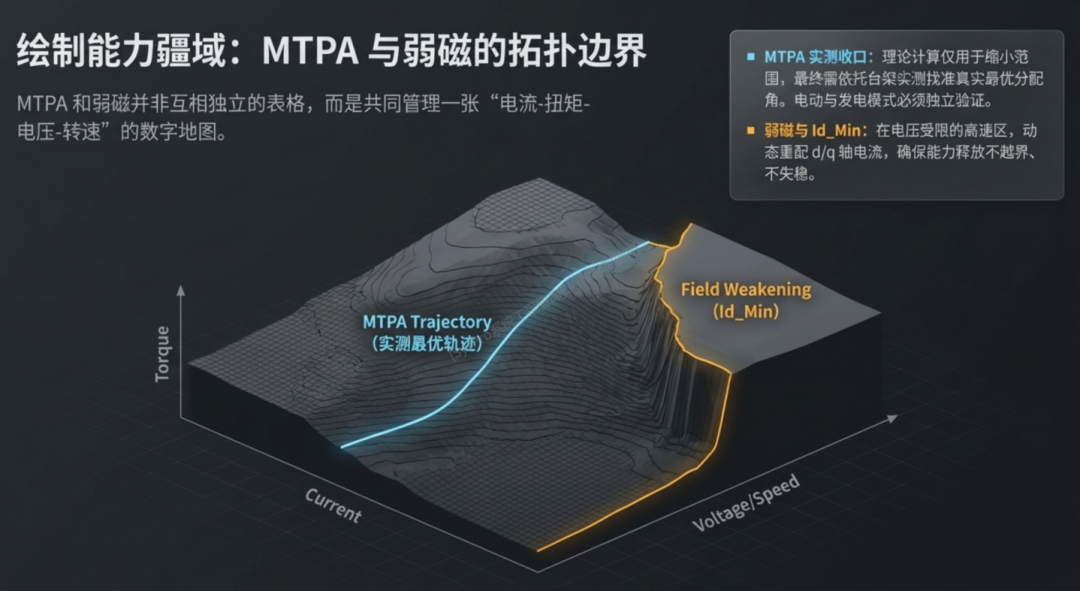
05 MTPA、弱磁与外特性边界标定
5.1 MTPA实测最优轨迹
5.2 弱磁、Id_Min与高速能力
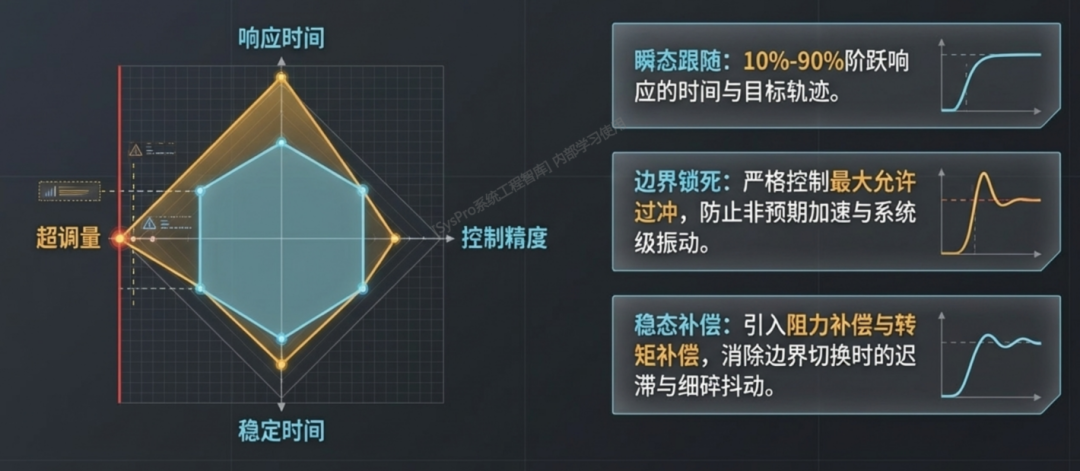
06 精度、响应与动态补偿标定
6.1 动态性能指标平衡
6.2 阻力/转矩补偿与平顺性
下篇
07 诊断阈值与保护边界设定
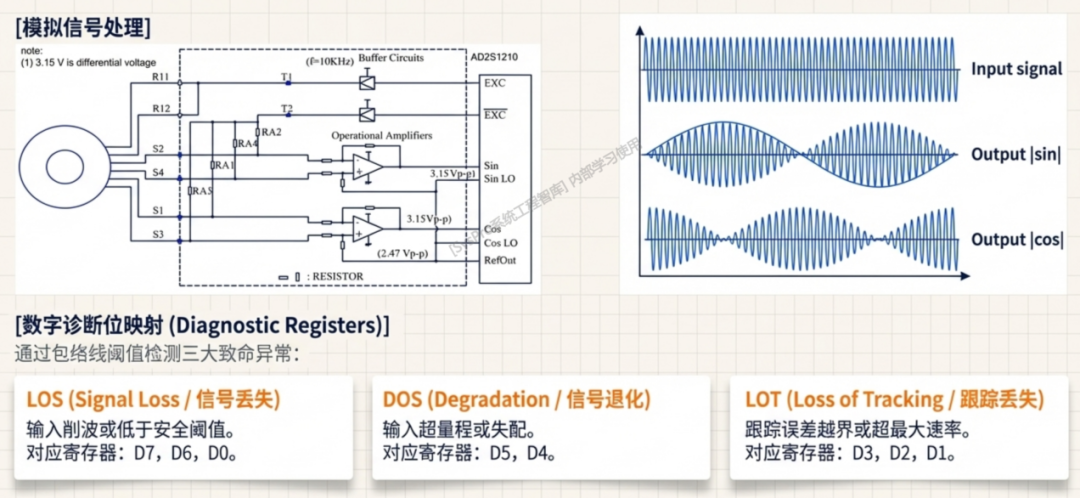
7.1 高压双路径诊断与门限设定
7.2 旋变、电流故障与分级保护
08 驾驶性、降额与低速场景标定
8.1 防抖、坡道、冰面与ESP协同
8.2 降额、防溜坡与自适应限值
09 冬夏季路试与量产数据闭环
9.1 高温、热浸与持续爬坡验证
9.2 低温、电压波动与SOC一致性
10 模型化标定与平台化复用
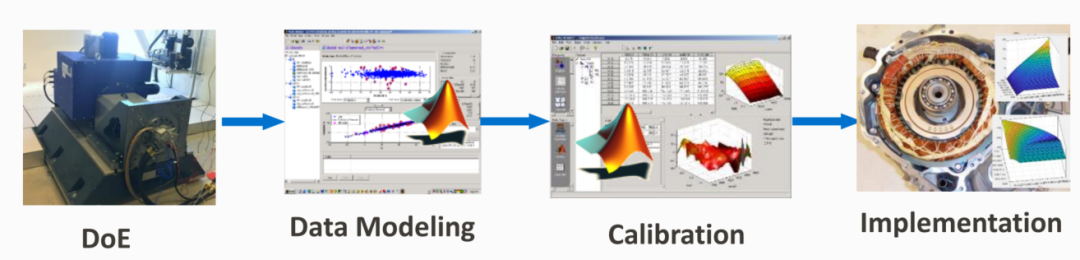
10.1 DoE、代理模型与自动查表
10.2 参数资产化与平台继承复用
注:以上完整内容知识星球发布(点击文末"阅读原文"了解,)
上篇
01
标定本质:建立整车扭矩秩序
很多团队在项目初期讨论电驱动标定时,喜欢直接问"先调哪个参数"。这个问题很重要,但更关键的问题其实是:你到底在给什么对象做标定?如果对象只被理解成"一个逆变器带一个电机",那后面很多问题都会被看窄。更准确的说法应该是,标定的对象是一整条扭矩链:控制器如何理解电机,电机如何把电流变成扭矩,扭矩如何经过传动系统和轮胎变成车辆加减速,异常时又如何被诊断、限扭和恢复?
也正因为如此,标定真正建立的不是某一张表,而是一种整车扭矩秩序。所谓扭矩秩序,就是驾驶员发出意图之后,系统在什么范围内可以快速响应、在什么情况下要保守处理、在越界时如何退让、在恢复时如何回到正常控制。
|SysPro备注:正式开始前,我们先把标定的对象边界讲清楚。这是个基本概念:标定它不是单纯调电机,而是在建立一整条从控制器到驾驶员体感都成立的扭矩秩序。
图片来源:SysPro
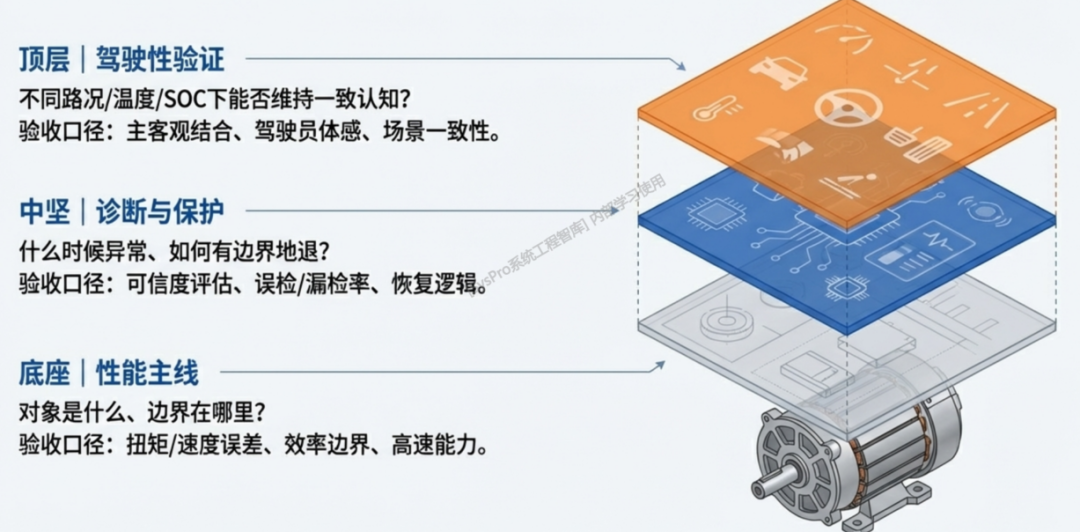
1.1 性能、诊断、驾驶性三层逻辑
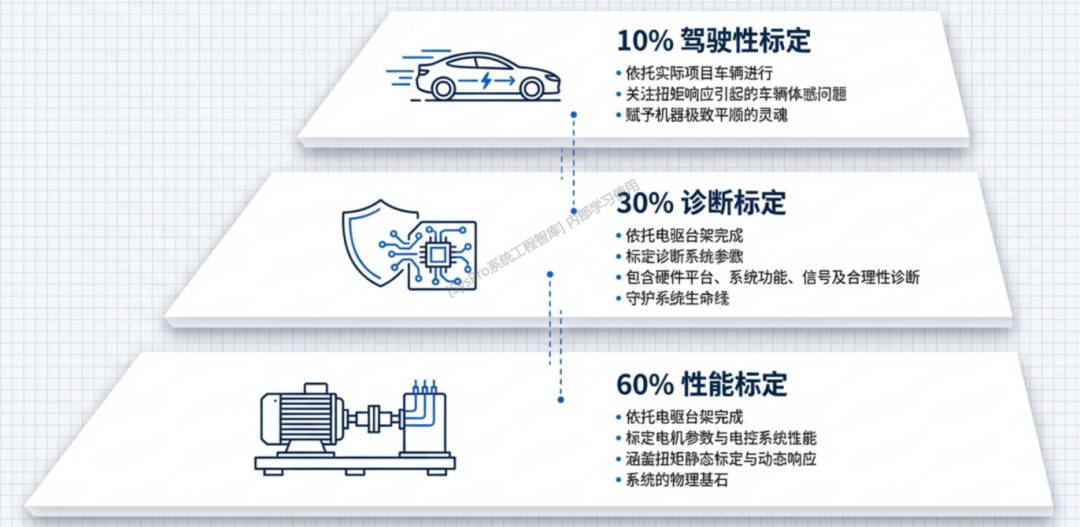
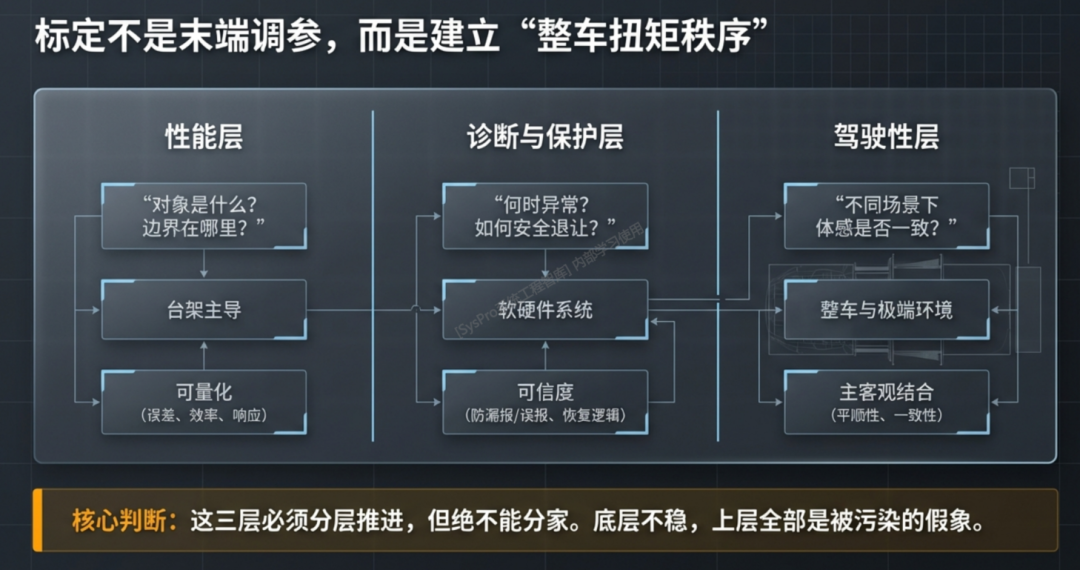
下面我们先建立个全局架构,标定的三个层级:性能标定、诊断标定、驾驶性标定。
图片来源:SysPro
性能标定,通常占电驱动台架工作量的大头,一般认为大约占整个过程的大部分。
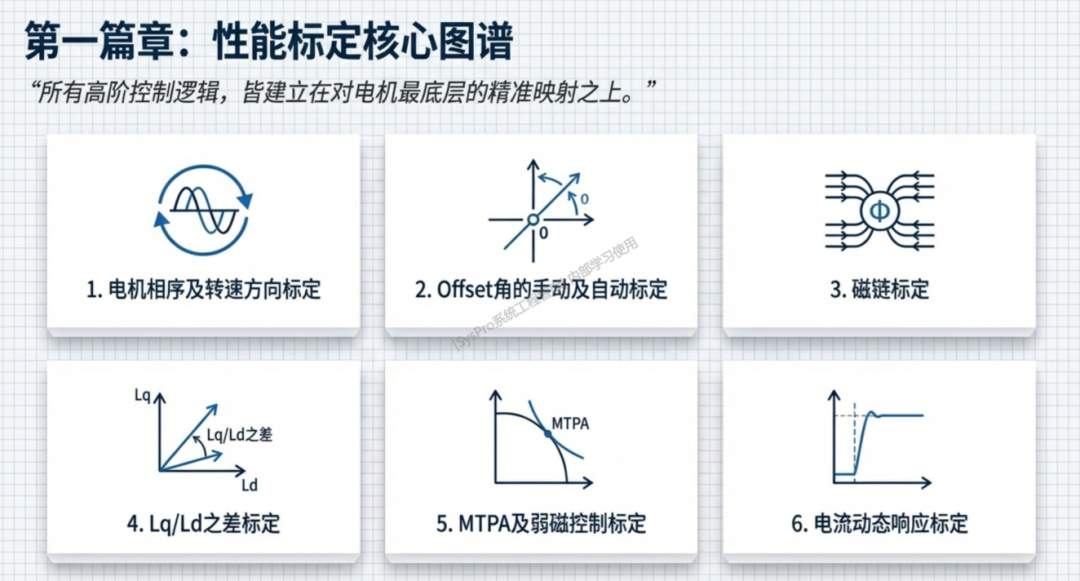
这是因为它负责回答最底层的问题:控制器眼里的这个电机对象到底长什么样?相序、正转方向、偏移角、磁链、Lq/Ld、MTPA、弱磁、电流动态响应,这些都属于性能层。只要这一层还不稳,后面很多现象都不具备可解释性。
图片来源:SysPro
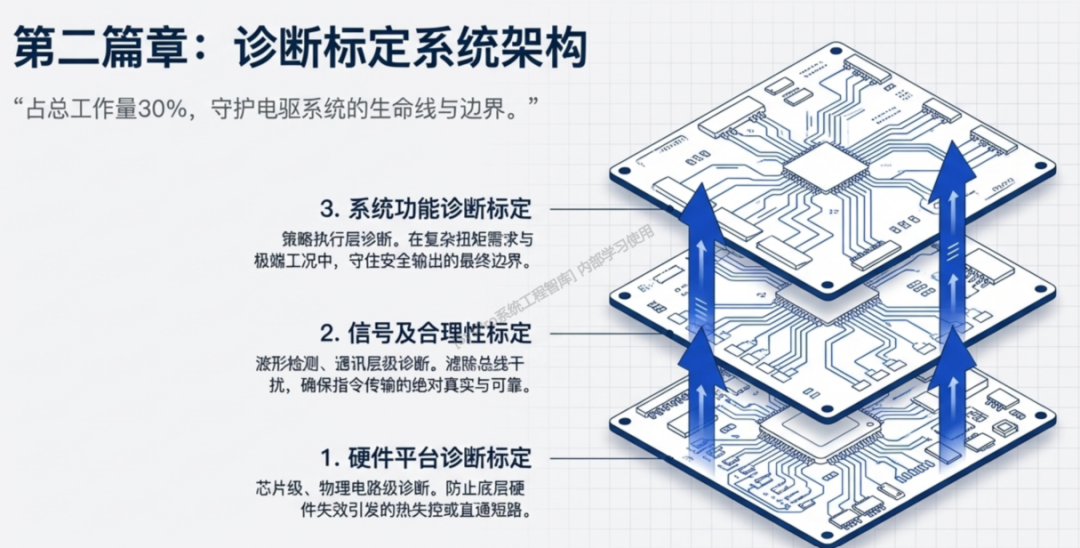
诊断标定,则大约占到另外一大块工作量。
它的价值在于,系统不只要会控,还要知道什么时候已经不该继续按正常逻辑去控?电流失控、高压电压异常、旋变信号失真、软件保护阈值越界、硬件链路不合理,这些都不是"有问题再看"的附属项,而是量产控制秩序的一部分。门限过紧会造成误触发,门限过松又会侵蚀安全边界,所以诊断层绝不是性能层做完后随手配一下。
图片来源:SysPro
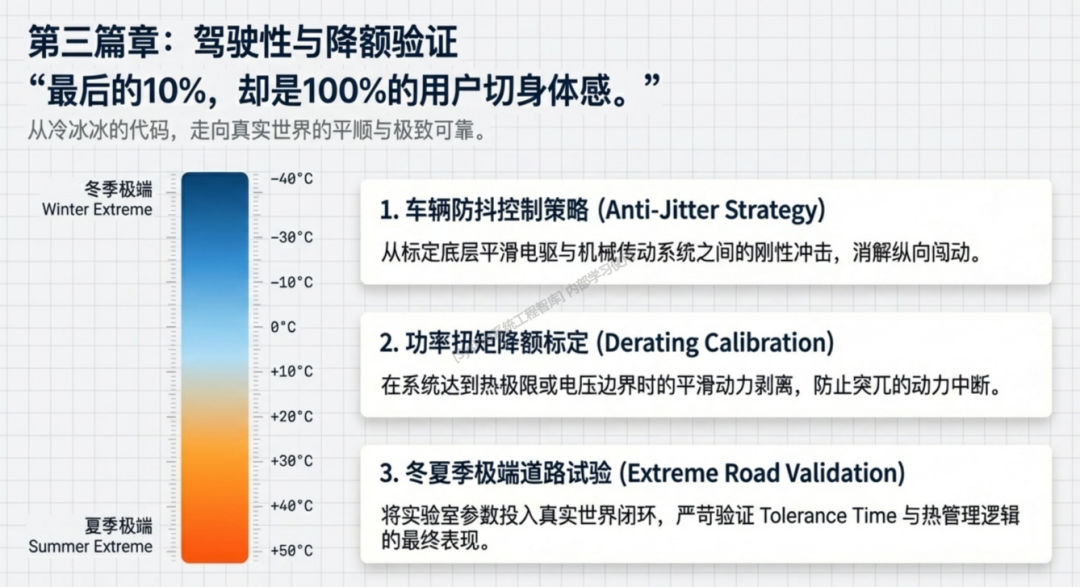
驾驶性标定,虽然在台架工时占比上往往更小,但它承担的是最终体验收口。
台架上的对象边界相对干净,而整车里还会叠加电池状态、传动链刚度、轮胎附着、ESP 协同、坡度和环境温度等因素。很多看起来像"电机响应慢"的问题,本质上可能是传动系统振动;很多看起来像"控制器抖动"的问题,真正根因又可能是低温电压波动、低附着或底盘系统介入。
图片来源:SysPro
因此,这里我们也可以把上述提到的三层理解成三种验收标准:
性能层更偏可量化,台架上直接看扭矩误差、速度误差、效率边界和高速能力
诊断层更偏可信度,看误检率、漏检率、触发延迟、恢复逻辑
驾驶性层更偏主客观结合,既要看波形,也要看驾驶员感受和典型场景一致性
把这三层分清以后,标定这件事就不再是调参数,而是在搭建一整套量产控制秩序。
|SysPro备注:上面讲得这些不仅适用于标定工程人员,对于实际产品开发中的任意成员都适用,因为只有把这一基本概念统一,软硬件、台架、系统、整车几波人才能统一理解、协同推进后续工作,下面我们具体聊聊。上面提到的三层,也会在后续主章节中详细展开。
图片来源:SysPro
1.2 台架/软件/整车统一协同语言
相信大家也有感受,很多项目推进不顺,并不是某个人不会调,而是台架团队、软件团队、整车团队说的根本不是同一种语言:
台架团队更关心电流、扭矩、速度和效率图
软件团队更关心控制模式、滤波、状态机、故障分级
整车团队更关心起步、跟脚、顿挫、坡道、冰面和热衰减
如果这三拨人之间没有一套统一的对象定义,最后就很容易出现"大家都很忙,但问题越改越散"的情况。|SysPro备注:这也是System Engineering重要的原因所在
图片来源:SysPro
所以标定一开始就应该约定几个最基本的问题:车辆前进方向对应的电机正转是什么?软件相序和硬件相序的映射怎么定义?哪些指标算台架验收、哪些算整车验收?诊断触发以后是限扭、限功率还是直接退出?恢复条件又是什么?别小看这些定义类问题,它们看起来不像参数,但后面所有参数都依赖这些定义。

图片来源:SysPro
如果把这个工作做扎实了,台架数据才能被软件正确解释,软件逻辑才能被整车正确验证。否则就会出现一种非常典型的现象:台架说指标已经达成,整车却说车还不好开;软件说诊断已经合理,整车却说误报码太多;整车说坡道起步不稳,台架却找不到异常。真正成熟的标定,一开始就在建立共同语言,而不是到项目后期再去翻译各方结论。
图片来源:SysPro
|SysPro备注:上面想强调的是标定不是末端调参。末端调参的逻辑是问题出来了再修、而系统工程标定的逻辑,是先把语言、对象、边界和流程定义清楚,再让不同团队在同一张地图上推进。之所以先提这部分,是想先把对象、边界和顺序锚住,再去看具体参数,就更容易抓住主线。
以下内容知识星球中发布
02
台架标定前:输入条件与验收口径
(知识星球发布)
2.1 先决条件对标定质量的影响
2.2 上线前检查与指标定义
图片来源:SysPro
03
标定流程:步骤与先后依赖关系
(知识星球发布)
3.1 全流程节点与执行顺序
3.2 数据核对、版本冻结与复测

图片来源:SysPro
中篇
04
基础坐标系与对象参数标定
(知识星球发布)
4.1 相序、转向、极对数与旋变偏移
图片来源:SysPro
4.2 电流环PI、磁链、Lq/Ld与传感器
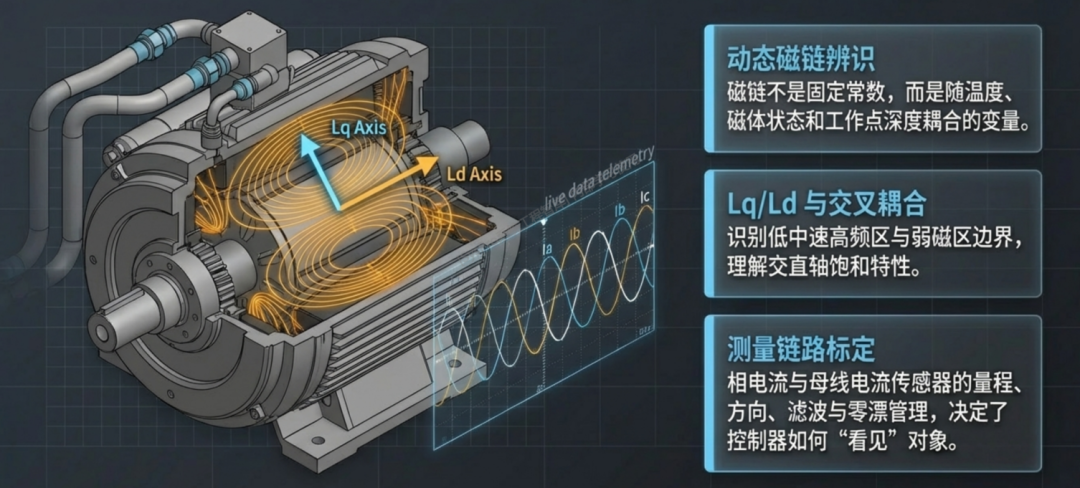
图片来源:SysPro
05
MTPA、弱磁与外特性边界标定
(知识星球发布)
5.1 MTPA实测最优轨迹
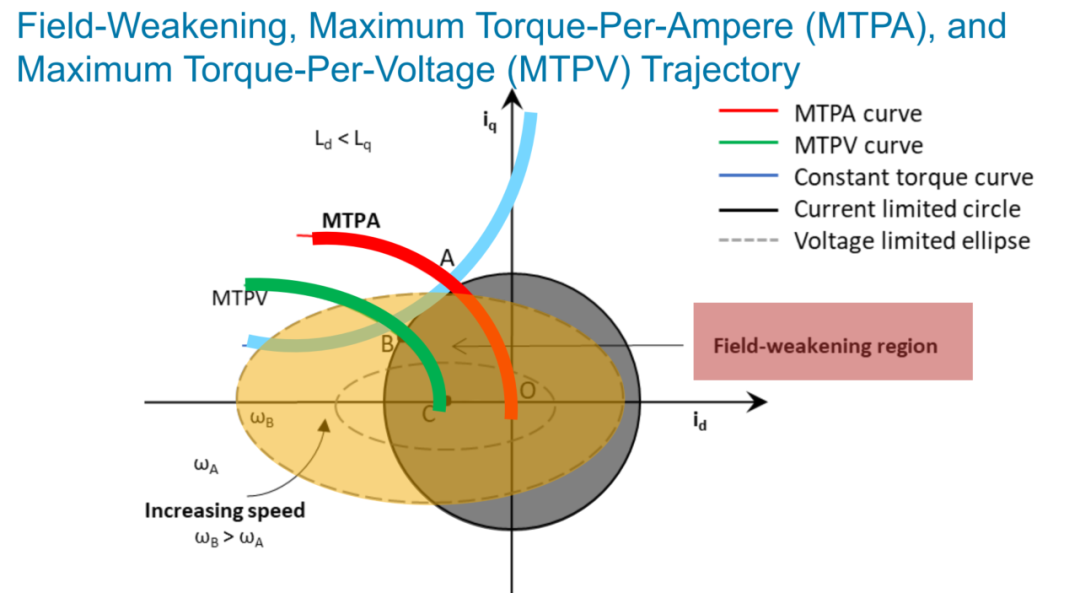
图片来源:Mathworks
5.2 弱磁、Id_Min与高速能力
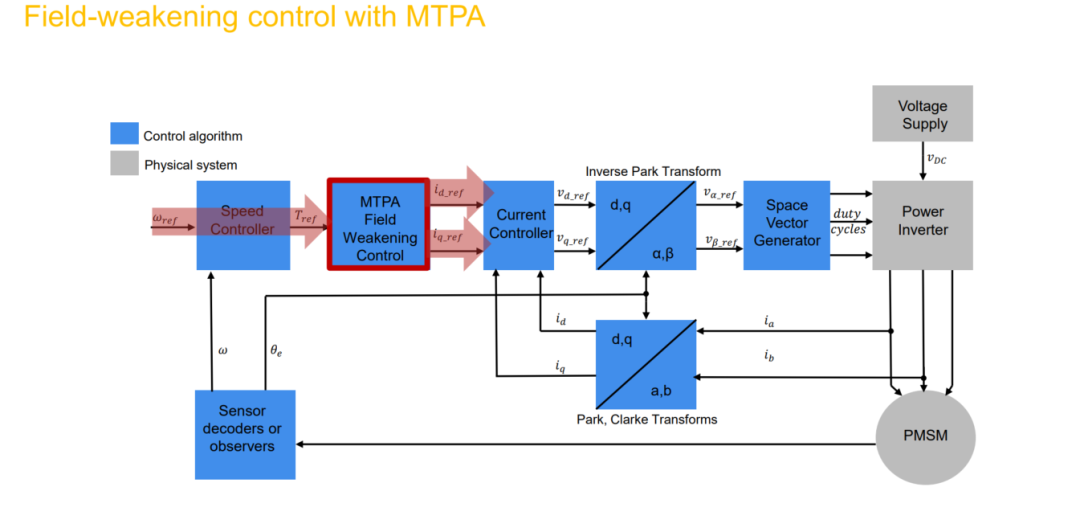
图片来源:Mathworks
06
精度、响应与动态补偿标定
(知识星球发布)
6.1 动态性能指标平衡
6.2 阻力/转矩补偿与平顺性
图片来源:SysPro
下篇
07
诊断阈值与保护边界设定
(知识星球发布)
7.1 高压双路径诊断与门限设定
7.2 旋变、电流故障与分级保护

图片来源:SysPro
08
驾驶性、降额与低速场景标定
(知识星球发布)
8.1 防抖、坡道、冰面与ESP协同
8.2 降额、防溜坡与自适应限值

图片来源:SysPro
09
冬夏季路试与量产数据闭环
(知识星球发布)
9.1 高温、热浸与持续爬坡验证
9.2 低温、电压波动与SOC一致性

图片来源:SysPro
10
模型化标定与平台化复用
(知识星球发布)
10.1 DoE、代理模型与自动查表
10.2 参数资产化与平台继承复用

图片来源:SysPro

图片来源:SysPro
|SysPro备注:以上为节选,完整解读内容星球内搜索关键字查阅
以上是电驱动系统标定全流程深度拆解:从生产扭矩秩序、基础参数,到 MTPA/弱磁、诊断架构与模型化标定闭环v1.0的解析(节选),完整版解读会在知识星球[SysPro|电驱动系统性能解读]专栏更新发布,欢迎阅读学习,希望有所帮助!
- 随机文章
- 热门文章
- 2025低空技术与工程大会在京开幕
- 阿普奇双脑架构:多场景多形态具身智能机器人的可靠智脑
- 京东外卖又下一城 59.6%南京消费者首选京东外卖
- 《藏海传》:传统文化的创新表达
- 天创信用:十年砥砺前行,开启信用科技新征程
- 人形机器人商业化加速,祥鑫科技大力布局灵巧手
- “影”领夏日!超60部佳片来袭,暑期观影指南请查收→
- 这个新兴职业 让沉淀千年的文化“随手可摸”
- 越疆发布人形“远程存在”技术,让机器人隔空千里执行复杂任务
- “50万的豪华” 13.99万的起售价 风云A9L来了!
- 1感染甲流后该如何科学调养?饮食起居这样做,感染甲流后该如何科学调养?饮食起居这样做
- 2马克龙去的这所大学,太宝藏了吧!,马克龙去的这所大学,太宝藏了吧!
- 3北方多地迎来降雪降温天气 各部门联动“战”寒潮筑牢安全防线,北方多地迎来降雪降温天气 各部门联动“战”寒潮筑牢安全防线
- 4“无保护”攀岩真的无保护吗?“无保护”攀岩真的无保护吗?
- 5福州发布公告:吴石故居将封闭施工,展开系统性修缮
- 6城中话债|激活民间投资:让有效率的资本站上C位
- 7科学家的照片排在董事长之上,科学家的照片排在董事长之上
- 8晚间重磅!又一万亿级券商将诞生 券业并购潮涌
- 911月份“菜篮子”产品价格呈现季节性上涨 多因素推高生产成本,11月份“菜篮子”产品价格呈现季节性上涨 多因素推高生产成本
- 10何立峰:有力有序有效做好2026年金融重点工作

